
به یاد دارم که وقتی در کودکی متوجه شدم که فقط با جابجا کردن سیم های مثبت و منفی آرمیچر جهت چرخش آن عوض می شود چقدر خوشحال شدم! انگار که باری از روی دوشم برداشته شد! البته نمی دانم چرا هر چند وقت یکبار به این تجربه شک می کنم و دوباره با امتحان آن خوشحال می شوم! ?
–
مدتی قبل مشغول طراحی و اجرای یک تابلوی نمونه ی IoT (اینترنت اشیاء) بودم؛ بخشی از آن برای نمایش کنترل پرده ی فرضی از راه دور بود. پرده با یک موتور گیربکسی پیچیده می شد و دوباره با حرکت معکوس پایین می آمد؛ برای کنترل موتور پرده هم دو رله در اختیار داشتم که با ریزپردازنده خاموش و روشن می شد.
بعد از کمی جستجو برای یافتن مداری که بتوان با دو کلید موتور را راستگرد و چپگرد کرد، با پل H یا H-Bridge آشنا شدم:
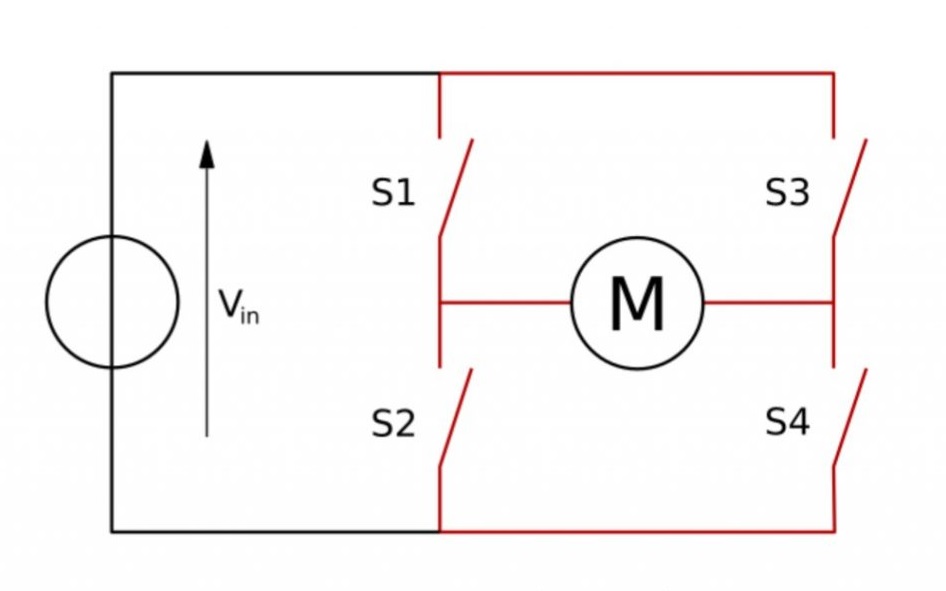
در این مدار می توان به راحتی با تغییر وضعیت کلید های ۱ و ۴ و همچنین کلید های ۲ و ۳، بدون هیچ زحمتی جهت موتور را تغییر داد. با الهام از طرح بالا، به طرح زیر برای استفاده در دو رله می رسیم:
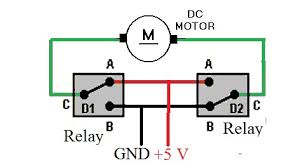
تصویر بسیار گویاست؛ با تغییر وضعیت رله ها، نوع قطب دو سر موتور تعیین می شود. برای خاموش کردن موتور هم می توان همزمان هر دو رله را در وضعیت A یا B قرار داد.